

Tipos de robots
Los robots son entidades virtuales o mecánicas que se utilizan para la realización de trabajos automáticos y son controlados por medio de computadoras.
A grandes rasgos se puede hablar de los siguientes:
Androides: estos artilugios se parecen y actúan como si fueran seres humanos. Este tipo de robots no existen en la realidad, por lo menos por el momento, sino que son elementos ficcionales.
Móviles: estos robots cuentan con orugas,
ruedas o patas que les permiten despl azarse
de acuerdo a la programación a la que fueron
sometidos. Estos robots cuentan con sistemas de
sensores, que son los que captan la información
que dichos robots elaboran. Los móviles son
utilizados en instalaciones industriales, en la
mayoría de los casos para transportar la
mercadería en cadenas de producción así como
también en almacenes. Además, son herramientas
muy útiles para investigar zonas muy distantes o
difíciles de acceder, es por eso que en se los
utiliza para realizar exploraciones espaciales o
submarinas.
azarse
de acuerdo a la programación a la que fueron
sometidos. Estos robots cuentan con sistemas de
sensores, que son los que captan la información
que dichos robots elaboran. Los móviles son
utilizados en instalaciones industriales, en la
mayoría de los casos para transportar la
mercadería en cadenas de producción así como
también en almacenes. Además, son herramientas
muy útiles para investigar zonas muy distantes o
difíciles de acceder, es por eso que en se los
utiliza para realizar exploraciones espaciales o
submarinas.
 Industriales:
los robots de este tipo pueden ser electrónicos
o mecánicos y se los utiliza para la realización
de los procesos de manipulación o fabricación
automáticos. También se les llama robots
industriales a aquellos electrodomésticos que
realizan simultáneamente distintas operaciones.
Industriales:
los robots de este tipo pueden ser electrónicos
o mecánicos y se los utiliza para la realización
de los procesos de manipulación o fabricación
automáticos. También se les llama robots
industriales a aquellos electrodomésticos que
realizan simultáneamente distintas operaciones.
Médicos:
bajo esta categoría se incluye n
básicamente las prótesis para disminuidos
físicos. Estas cuentan con sistemas de mando y
se adaptan fácilmente al cuerpo. Estos robots lo
que hacen es suplantar a aquellos órganos o
extremidades, realizando sus funciones y
movimientos. Además existen robots médicos
destinados a la realización de intervenciones
quirúrgicas.
n
básicamente las prótesis para disminuidos
físicos. Estas cuentan con sistemas de mando y
se adaptan fácilmente al cuerpo. Estos robots lo
que hacen es suplantar a aquellos órganos o
extremidades, realizando sus funciones y
movimientos. Además existen robots médicos
destinados a la realización de intervenciones
quirúrgicas.
 Teleoperadores:
estos robots son controlados de manera remota
por un operador humano. A estos artilugios se
los utiliza en situaciones extremas como la
desactivación de una bomba o bien, para
manipular residuos tóxicos.
Teleoperadores:
estos robots son controlados de manera remota
por un operador humano. A estos artilugios se
los utiliza en situaciones extremas como la
desactivación de una bomba o bien, para
manipular residuos tóxicos.
 De acuerdo a su arquitectura, los robots
pueden clasificarse en:
De acuerdo a su arquitectura, los robots
pueden clasificarse en:
Poliarticulados: si bien estos pueden tener de diversas configuraciones, lo que tienen en común estos robots es que son sedentarios. Estos son diseñados para mover sus terminales con limitada libertad y de acuerdo a ciertos sistemas de coordenadas. Estos robots son ideales para cuando se precisa abarcar una amplia zona de trabajo.
Móviles: a diferencia de los anteriores, estos han sido diseñados para desplazarse, ya sea utilizando un sistema locomotor rodante o bien, mediante plataformas o carros. Estos se trasladan utilizando sensores que reciben información del entorno o bien, por telemandos.
Androides: estos robots buscan imitar de manera parcial o total la el comportamiento y forma del ser humano. Como no están prácticamente desarrollados se los usa para la experimentación y el estudio.
Zoomórficos: la locomoción de estos robots imita a la de distintos animales y se los puede dividir en caminadores y no caminadores. Estos últimos están aún muy poco desarrollados mientras que los caminadores sí lo están y resultan útiles para la exploración volcánica y espacial.

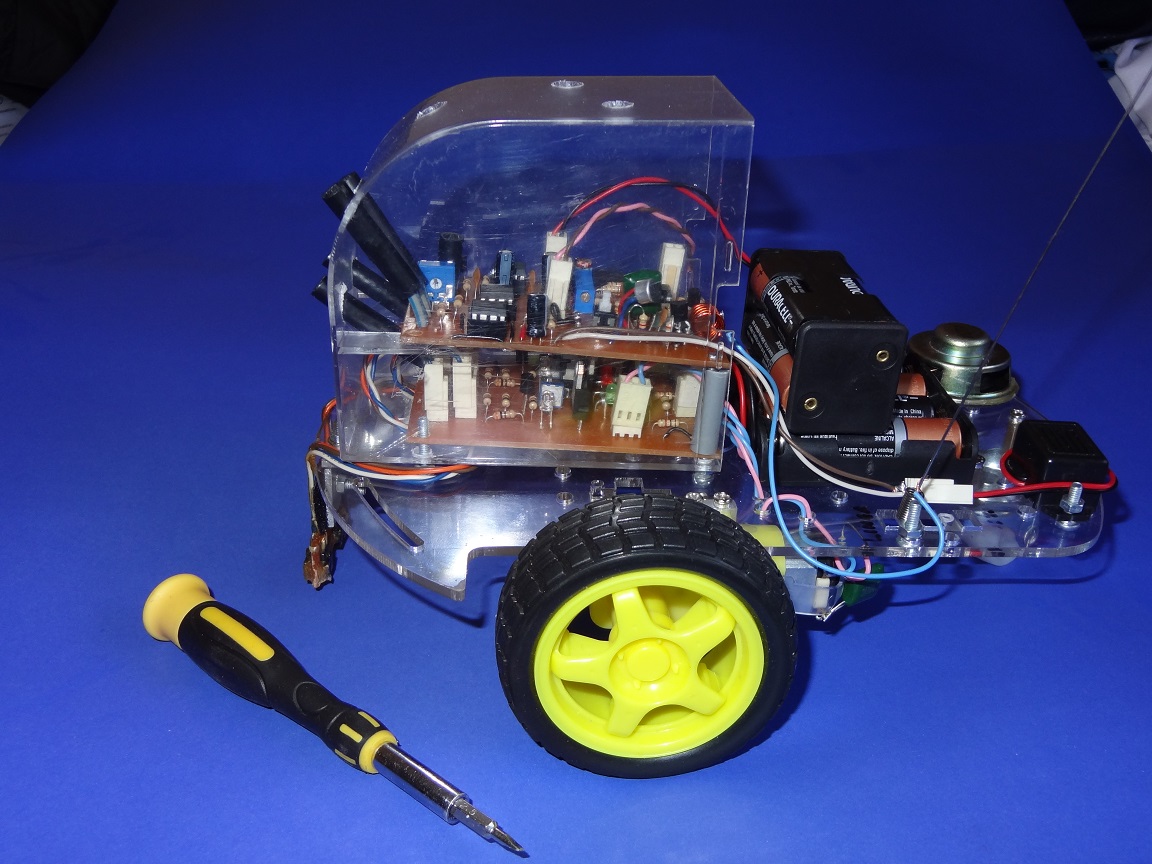
Seguidores de línea, luz.- Robots para educación, estudio e investigación. Se pueden fabricar con conocimientos de electrónica. Otros Utilizan plataformas open hardware como arduino, raspberry, etc.
http://www.tiposde.org/general/460-tipos-de-robots/
Híbridos
Estos robots corresponden a aquellos de difícil
clasificación cuya estructura resulta de una
combinación de las expuestas anteriormente.
Cabe decir que pese a que la clasificación
anterior es la más conocida, existe otra no
menos importante donde se tiene más en cuenta la
potencia del software en el controlador, lo que
es determinante de la utilidad y flexibilidad
del robot dentro de las limitantes del diseño
mecánico y la capacidad de los sensores.
De acuerdo a esta posición
los robots han sido clasificados de acuerdo a:
*- su generacion
*- su nivel de inteligencia
*- su nivel de control
*-nivel del lenguaje de programación.
Éstas clasificaciones reflejan la potencia del software en el controlador, en particular, la sofisticada interacción de los sensores. La generación de un robot se determina por el orden histórico de desarrollos en la robótica. Cinco generaciones son normalmente asignadas a los robots industriales. La tercera generación es utilizada en la industria, la cuarta se desarrolla en los laboratorios de investigación, y la quinta generación esta en investigación.
http://informaticafrida.blogspot.pe/2009/03/tipos-de-robots.html
http://www.guillenxt.com/2012/03/las-5-generaciones-de-la-robotica.html
https://es.wikipedia.org/wiki/Robot_seguidor_de_l%C3%ADnea
Nuestros modelos de robot para los Juegos Florales y FENCYT desarrollados
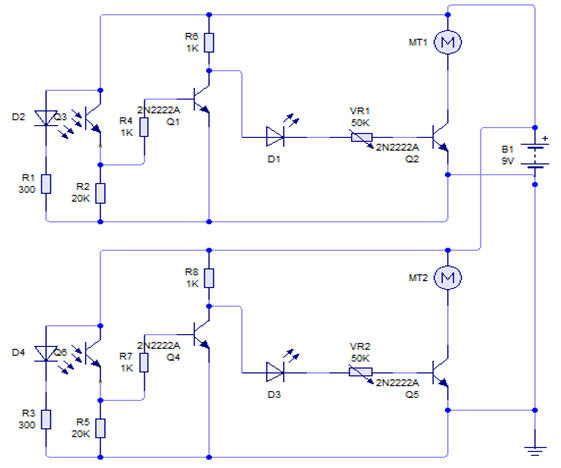
Robot seguidor de luz transistorizado
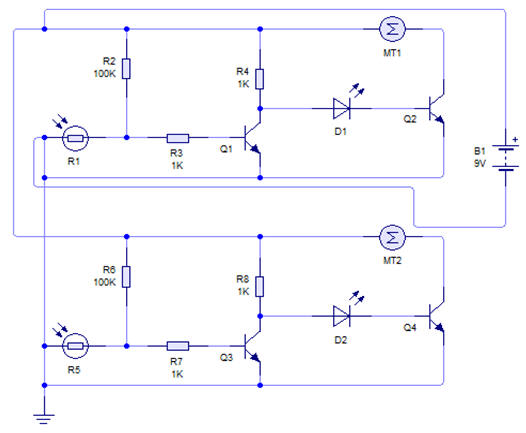
Robot seguidor de linea transistorizado
Sensores:
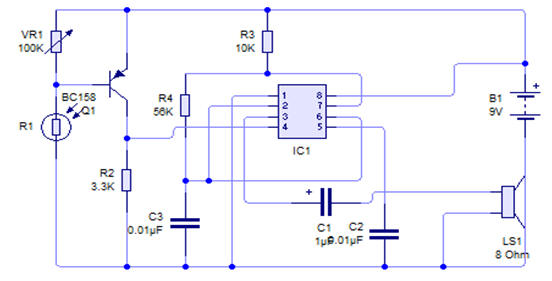
Sensor de luz UV
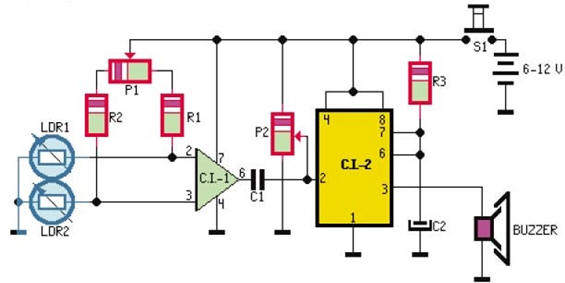
Detector de movimiento
Modelo terminado: Este modeloe s totalmente autónomo no necesita programación. El modelo integra la función de seguidor de línea, luz y los sensores de luz UV y movimiento. Clic en la imagen para ver el resultado
Robot seguidor de línea/luz velocista
Este modelo esta en construcción y desarrollo, Utiliza un control electrónico digital 40106 y control de motores l293B, y es totalmente de electrónica digital
Pronto los esquemas e imágenes.
Su finalidad es participar en competencias organizados por la Universidad Nacional del Altiplano
en la categoría colegios.
Robot seguidor de linea/luz central metereológica
Este modelo. Es avanzado, ya que tiene la característica de ser híbrido: tiene integrado una parte construida íntegramente con electrónica digital que controla el seguidor de linea/ luz y la otra parte consta de una placa open hardware ARDUINO MEGA que controla sensores de temperatura, humedad, luz
Pronto los esquemas y resultados